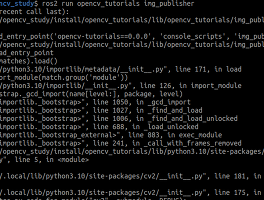
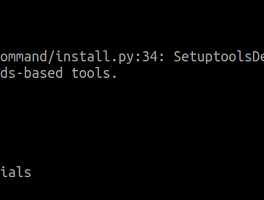
Robot/Robot Program - ROS (78) 썸네일형 리스트형 핑크랩이 주행로봇 관제 시스템 OpenRMF 컨텐츠를 준비했습니다. 2024. 1. 28. 08:00 제가 개인적으로 간간히 SNS에 OpenRMF 이야기를 한적이 있습니다만, 최근 저희 핑크랩이 로봇 관제 시스템인 OpenRMF에 대한 교육 컨텐츠를 준비완료 했습니다. 관련해서 여러 기관분들의 교육 문의와 또 개발 문의를 환영합니다.^^. 그래서 OpenRMF에 대한 소개 글을 작성해야하겠다는 생각이 들어서 이렇게 글을 하나 올립니다. OpenRMF는 다수의 주행로봇과 그 주행로봇이 구동하는 환경을 통합하고 조율하는 도구입니다. 특히 네트워크 영역에서 힘들어하는 여러 로봇 개발자들에게 뭔가 획기적인 도움이 될것 같습니다. OpenRMF는 다양한 유형의 제조사의 주행로봇을 하나의 시스템으로 통합하여 관리할 수 있습니다. 실제로 OpenRMF를 이용해보면 다수의 주행로봇의 경로관리, 자원 모니터링, 로봇 .. Ubuntu에서 zsh에서 ROS2 명령이 자동 완성되지 않을 때 2023. 11. 27. 08:00 우분투든, 맥이든 터미널 작업을 하다보면, 점점 zsh를 사용하고 싶어집니다. 일단 이쁘니까요^^. 그리고 몇몇 눈에 띄는 기능들도 있구요. 맥에서는 zsh 설치와 터미널 세팅에 대한 이야기를 했었습니다. https://pinkwink.kr/1354 Mac M1 노트북 (Mac silicon) 터미널 세팅 - iTerm2 요즘 노트북 세계에 한 가지 큰 이슈라면 애플에서 나온 맥 m1 노트북이 아닐까요. 정말 많은 이슈를 만들고 있는 것 같습니다. 저는 예전에 맥북 사용에서 해두면 편한 몇 가지 설정을 이야기한 pinkwink.kr 아무튼... 우분투 유저들도 bash를 사용하다가 zsh로 넘어가는 일이 많은데요. 그 때, 한가지~ ROS2 유저들의 경우 ROS2 명령이 자동완성되지 않을 때가 있습니다... ROS2에서 OpenCV를 사용할 때 numpy 관련 에러가 난다면 2023. 10. 27. 08:00 ROS2에서 OpenCV를 사용하기 위해 opencv-python 모듈을 pip로 설치하고, 코드 내에서 import cv2를 넣었는데 그 위치에서 빌드에서는 괜찮았는데 실행할 때 오류가 아래와 같이 나는 경우가 있습니다. 이 때는 pip install --upgrade 명령으로 numpy의 버전을 올려주면 해결이 됩니다. ROS2 colcon build에서 SetuptoolsDeprecationWarning 대응법 2023. 10. 25. 08:00 ROS2에서 colcon build를 하면 SetuptoolsDeprecationWarning이 뜰때가 있습니다. 오늘은 그 워닝을 어떻게 극복할지를 이야기 하려고 합니다. 이유는 setuptools 버전의 호완문제로 알려져 있습니다. 이렇게 colcon build를 할때 /usr/lib/python3/dist-packages/setuptools/command/install.py:34: SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools. warnings.warn( --- 와 같이 워닝이 뜨는거죠. 이 워닝이 떠도 사용하는데는 문제가 없습니다. 현재 제 PC.. ROS2 humble을 설치하고 공부하는데 필요한 설정 2023. 8. 24. 08:00 저는 ROS2를 교육할 기회가 많았는데요. 그때마다 설정이나 설치 문제로 항상 많은 시간을 보내게 됩니다. 그걸 조금이라도 줄일려고 영상으로 그 과정을 만들었는데요. 이번에는 이 영상을 공유하려고 합니다. ROS2 humble 설치하기 전 인트로~ 먼저 인트로입니다. 제 책도 소개할겸 이런 저런 이야기를 하는 영상입니다. 저의 책은 Galactic 버전으로 되어 있지만, 지금 영상은 Humble을 기준으로 하고 있습니다. 이유는 알 수 없으나 요즘 제 블로그가 입주해 있는 티스토리의 어떤 기능과 충돌로 인내 유투브 영상이 글 내에서 조금 늦게 뜹니다. 잠시 기다려 주세요 https://youtu.be/fOwt4It7sZk sublime text와 terminator 설정 그리고 저는 수업때는 에디터로 s.. ROS Melodic에서 YOLO로 detection 된 사람 수 세기 2022. 3. 17. 08:00 최근 저는 광운대에서 ROS 기초 수업을 진행했습니다. 해당 수업은 제가 ROS 기초를 진행하고 마치면, 그 다음 다른 분이 이어서 실제 주행로봇을 가지고 프로젝트를 진행하는 방식이었습니다. 그래서 제 뒤에 이어지는 수업에서 ROS melodic 버전을 사용하기 때문에 저도 수업을 melodic으로 진행을 했죠. 근데 melodic 버전에서 제가 블로그에서 YOLO pkg를 소개했던 적이 있습니다. https://pinkwink.kr/1256 ROS melodic에서 영상인식 YOLOv3 패키지 세팅하기 최근 여러글에서 이야기했지만, 제가 지금은 (임시.ㅠㅠ.로) 한양대 에리카에 있습니다. 여러 고마운 분들의 배려로 아주 다양한 재미있는 일들을 경험중이랍니다. 그 중에 또 하나 멋진 일은 아 pinkwi.. ROS 카메라 캘리브레이션 수행하기 2021. 4. 27. 08:00 오늘은 ROS melodic에서 카메라를 calibration하는 과정을 설명하려고 합니다. 카메라 영상을 어떻게 사용하는지에 따라 캘리브레이션이 필요할 때가 있는데요. 어떻게 하는지 간단히 보여드릴까 합니다. roscore를 실행하고~ 사용하시는 카메라를 기동하면 됩니다. 저는 최근에 개발에 참여한 R1mini의 ROS 패키지에서 카메라를 기동하는 명령을 사용하면 됩니다. 아무튼 카메라를 기동하구요~ 카메라 영상이 잘 들어오는 rqt_image_view로 확인합니다. 그리고 rostopic list로 영상의 토픽이름을 확인합니다. 제 경우는 jetson 카메라를 실행했기 때문에 /main_camera/image_raw가 토픽 이름입니다. 이제 위 링크에서 체크보드를 받습니다. 저 체크 보드 파일은 RO.. ROS 토픽을 터미널에서 그래픽하게 보여주는 rosshow 2021. 3. 21. 09:34 오늘은 터미널에서 토픽을 그래픽하게 보여주는 매우 재미있는 패키지를 소개해드릴려고 합니다. 요즘 제가 로봇에 탑재된 젯슨나노 같은 보드에 원격으로 접속할때가 많은데요. 그런 상황에서 정말 간단히 토픽- 특히 라이다나 이미지 토픽을 확인하고 싶을때 ssh로 접근한 경우는 힘든데요. 그때 바로 확인할 수 있습니다. 먼저 rosshow의 공식 github에서 설치 안내를 볼 수 있습니다. 먼저 python-pip를 설치하고 pip 명령으로 pip를 업그레이드 합니다. 이제 git clone 명령으로 소스를 받아오는데, 왠만하면 catkin_ws가 아니라 다운로드같은 다른 폴더에 받습니다. 이유는 빌드가 안되는 다른 폴더를 포함하고 있기 때문입니다. 이제 패키지를 받아보면 rosshow라는 폴더가 또 그 안에 .. 이전 1 2 3 4 5 ··· 10 다음