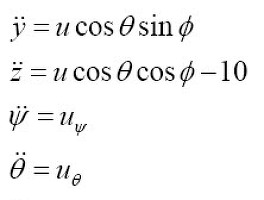
Posts by PinkWink (1380) 썸네일형 리스트형 [펌] 노무현 그분을 기억하기 위해 2009. 5. 26. 15:13 그 분을 기억하기 위해... 탐진강님( http://jsapark.tistory.com/250 )이 올리신자료를 그냥 제 블로그에 올립니다.. 물론 모든 자료가 탐진강님의 자료는 아니지만, 편집및 인용한것중 제가 가장 마음에 드는 글이라 그 출처로 말합니다. 각 사진들에는 웬만하면 원 출처가 있더군요...^^ (탐진강님은 출처를 명시한다면 배포해도 좋다고 해당 페이지 명시하셨습니다. 혹시 제 홈에서 가져가시는 분이 있다면 역시 출처는 탐진강님( http://jsapark.tistory.com/250 )으로 해 주시길 바랍니다. ) . 너무 기억하고 싶습니다. 그래서... 기억하고 싶은 사실을 그냥 보관하기 위해서입니다. I. 유서 너무 많은 사람들에게 신세를 졌다 나로 말미암아 여러 사람이 받은 고통이 .. 내 손으로 대통령으로 당선시킨 당신... 노무현 2009. 5. 24. 19:19 당시 주위사람들 설득해가며 한잔 소주값 제가 내면서 나름대로 저도 소심한 선거운동을 했습니다. 뭐 자기의견내기 정도의 수준이었지만, 그 대통령을 어떤 놈들이 탄핵했었을때 웃음이 나왔습니다. 지네 지지표 다 합쳐도 대통령당선표 만큼도 되지 않던 놈들이 지네끼리 모여서 내가 뽑은 대통령을 탄핵하다니... 그래도 웃었습니다. 그 탄핵 성공못할거라는 이상한 확신이 있었습니다. 그 분이 왜 그런 선택을 해야했는지 슬플 뿐입니다. 그러고 보면 정치인들 중에 유일하게 관심있었던 분이었던 것 같습니다. 우리나라 대한민국은 꽤 괜찮은 정치인 한 분을 잃어버린 모양입니다. 그게 우리의 참담한 현실인 모양입니다. (출처를 잘 모르겠습니다. 인터넷에 원체 많이 돌아다녀서 원 출처를 알 수없더군요.. 죄송합니다.) 아래 동영상.. 창원 백년찻집 2009. 5. 20. 17:34 제가 사는 창원에 괜찮은 찻집이 하나 있습니다. 백년찻집이라는 곳인데, 가장큰 장점은 찻집이라는거(^^) 그리고 분위기가 찻집에 어울린다는거, 그리고 밤늦게도 한다는 거지요^^ 가는 길은 도계광장 (창원과 마산이 만나면서 동읍, 진영으로 빠지는 길) 에서 진영방향으로 딱 3분정도 가면 왼쪽에 등을 아주 많이 달아놓은 곳이 있습니다. 도로를 가로지르는 고가도로가 다리처럼 지나가는 곳에서 1차선으로 붙어서 진입하면 됩니다. 가급적 저녁이나 밤에 가길 권장합니다. 그런데 이곳의 유일한 단점이 대중교통이 좀 불편합니다.ㅜ.ㅜ. 여하튼. 진입로 입니다. 저 곳으로도 차를 타고 지나갈 수 있습니다. 안쪽에 주차장이 있거든요... 그런데... 저녁때 가셨다면 보통 주차할 곳이 없으니 저 길은 걸어가시는 것도 괜찮습니.. 공학도에게 유용할 울프럼알파 2009. 5. 20. 03:22 울프럼알파로 이동 사실 울프럼알파라는 이름이 꽤 블로그 새글읽기에서 계속 등장하곤 했었는데 별 신경안쓰고 있었거든요. 그러다가 그냥 심심해서..^^... 살짝 들어가서 당연히 PinkWink라고 한번 검색... 뭔말이니? 라는 응답... 슬프더군요...ㅜ.ㅜ... 그래도 나름... 네이버나 다음, 구글에서는 제 홈페이지 주소가 뜨는데 말이죠... 그래서 당장 관심밖....^^... 그러다 방금... 울프럼알파에 관한 글을 우연히 읽고 테스트 삼아 'sin'이라고 검색했습니다. 물론 저의 의도는 수학의 sin함수를 이야기하죠... 그랬더니 좀 놀라운데요... 일단 첫 줄에 저렇게 나오구요... 그리고 정의와 직결되는 그래프하나 보여주네요...^^ 헉... 그러더니.. 오일러공식이나, 주기, x=0에서의 급.. 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계 2009. 5. 19. 21:51 궤환선형화기법을 이요해서 투로터를 제어(궤환선형화 기법을 사용한 Two-Rotor 안정화 제어기 설계)했었습니다. 그걸 쿼드콥터(쿼드콥터(Quadcopter)의 동역학 방정식)에 적용해 보겠습니다. 위 동역학을 한번 더 미분하고 식이 기니까 A, B, C, T로 치환하면 한번 더 미분한 식은 와 같이 나타납니다. 위 4차계시스템을 안정화하는 a, b, c, d를 설정하고나면 최종적으로 제어입력을 위와 같이 구성할 수 있습니다. Controller의 전체 블럭입니다. 이전에 공개한 쿼드콥터의 블럭과 같이 연결해서 사용하면 됩니다. 제어 결과 입니다...^^ 쿼드콥터(Quadcopter)의 동역학 방정식 2009. 5. 19. 21:38 쿼드콥터의 필요성에 대해서는 이전(쿼드콥터 소개...)에 이야기 했었습니다. 이번에는 그 쿼드콥터의 동역학 방정식에 대해서 이야기하겠습니다. 네 개의 로터(f1, f2, f3, f4)를 가진 쿼드콥터는 위와 같이 간략화 시킬 수 있습니다. 이 상태에서 전체적으로 작용하는 위치, 병진운동, 회전운동의 에너지 관계식을 위와 같이 만들 수 있는데 이때, ksi는 병진운동 상태를 eta는 회전운동 상태를 의미하고, q는 그걸 합친 거라고 해 두고 아래의 오일러-라그랑지안 방식으로 유도 하겠습니다. 위 식에 각 에너지를 대입하면 와 같이 전개 됩니다. 여기서 각 축 중심의 회전행렬로 x-y-z의 3축 회전행렬을 적용하면 와 같이 제어입력을 정리할 수 있습니다. 여기에 몇몇 인자를 정리하고 투로터때처럼 시뮬레이션을.. 궤환선형화 기법을 사용한 Two-Rotor 안정화 제어기 설계 2009. 5. 19. 21:12 아래의 Two-Rotor 시스템(Two-Rotor (VTOL) 시스템의 동역학 모델)은 제어입력 u1이 x, y라는 두 개의 상태에 동시에 인가가 되면서 x, y, theta를 모두 제어하는데 어려움이 있습니다. 단적인 예로 만약 u2가 잘 동작해서 theta를 '0'으로 안정화 시키는 순간 sin(theta)가 '0'이 되어서 x를 제어하기 어려워지게 되는 겁니다. 그래서 각 상태에 들어가는 제어입력을 분리시킬 필요가 생깁니다. 그래서 위에서처럼 두 번 더 미분하게 됩니다. 여기서 theta는 시간에 관한 함수기 때문에 theta에 관해 미분할때 조심하셔야합니다. 그러면 위와 같이 x_(4), y_(4)에 인가되는 제어입력을 분리시킬 수 있게 됩니다. 이때 궤환선형과기법을 사용해서 아래의 a, b, c.. Two-Rotor (VTOL) 시스템의 동역학 모델 2009. 5. 19. 20:57 Two-Rotor 시스템은 양익 비행체의 수직이착륙 동작(Vertical Take Off and Landing)을 동역학으로 모델링 한 것을 양익의 장착각도를 0로-즉, 양 날개가 동체에 수직으로 연결되어있다고 가정한 모델입니다. 위 그림에서 F1, F2가 두 로터가 내는 양력이 되고, theta는 기울어진 각도가 됩니다. 인가되는 힘은 총 3가지로서 위에 제시된것과 같습니다. 그 힘을을 수평방향, 기울어지는 각도, 동체 중심의 운동성분으로 각기 위와 같이 정리해볼 수 있습니다. 이를 x, y, theta에 관해 정리하면 위와같은 형태를 얻게 됩니다. 일반적인 시뮬레이션이라면, 다시 몇몇 파라미터를 간단히 두고 위와같이 표현할 수 있습니다. 실제 Two-Rotor는 딱 위의 동역학에 맞는 시스템을 실제로.. 이전 1 ··· 164 165 166 167 168 169 170 ··· 173 다음