벌써 이번 연재인 시스템 시뮬레이션 마지막회네요^^. 이전에 수행했던 결과로 제어기까지 설계를 완료했습니다. 비록 LQR은 트래킹 기법은 아니지만, 실제로 사용할때는 오차에 대한 설계를 통해서 트래킹을 간단히 해결할 수 있습니다.
- Simulation
- 1. 라그랑지 방법을 이용한 동역학 모델 구축하기
- Simulation
- 2. DC 모터의 동역학 포함시키기
- Simulation
- 3. MATLAB을 이용하여 시뮬레이션 구축하기
- Simulation
- 4. 시스템의 선형화
- Simulation
- 5. LQR 기법을 이요한 선형제어기 설계하기
- Simulation
- 6. 경로추적

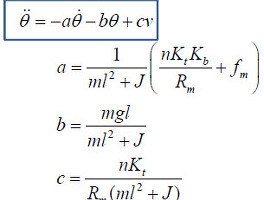
지난시간에 얻은 선형미방이었습니다.

여기서 간단히 기준신호를 계단입력이라고 한다면, 오차에 대한 식을 세워볼 수 있습니다. 그것을 이용해서 오차의 미방을 완성할 수 있지요

가중치를 좀 변경했습니다.

그렇게해서 다시 제어게인을 얻었습니다.

이전에 쓰던 시뮬링크 블럭인데요. 요걸 살짝

이렇게 변경해줍니다. 오차에 대한 시뮬레이션 환경을 꾸며야하는 거니까요. 추적해야할 기준수치는 0.1로 두겠습니다.

이렇네요. 대략 0.5초에 수렴한다는 것을 확인할 수 있네요. 실제로는 이정도만해도 쓸만합니다. 그래서 계속 레퍼런스값을 바꿔주는 거지요. 그러면 일정 경로를 따라갈 수 있습니다.

그러나 계단입력이 아니라 정현파를 가해보겠습니다.

살짝 늦게 따라가는 것을 확인할 수 있습니다. 이것이 마음에 들지 않는다면, 오차의 미방을 수정할 필요가 있습니다.

기준신호가 정현파이니까... 오차의 미분치가 바뀌어야하는 것이지요^^

그럼 시뮬레이션 블럭도 위와 같이 바꿔줘야합니다. 물론 전 귀찮아서 그냥 미분기 하나 달고 끝냈습니다.^^

정확히 일치했기 때문에 얼핏 선이 하나로 보이지만, 원체 잘 추적해서 그렇습니다.
이번 연재는 간단한 시스템을 예로 들긴했습니다만, 일반적으로 로봇을 제작 설계 및 제어하는 일반적 과정을 이야기해보았습니다.
'Theory > Lecture' 카테고리의 다른 글
| [엑셀 연재] 3. 차계부를 이용해 간단한 수식 배워보기 (14) | 2010.09.27 |
|---|---|
| [엑셀 연재] 2. 자동 채우기와 데이터 유효성 (2) | 2010.09.13 |
| [엑셀 연재] 1. 주간계획표를 만들어보자... (20) | 2010.08.30 |
| [시스템 시뮬레이션 연재] 5. LQR 제어기 설계 (44) | 2010.08.13 |
| [시스템 시뮬레이션 연재] 4. 시스템의 선형화 (3) | 2010.08.12 |
| [시스템 시뮬레이션 연재] 3. 동역학 MATLAB으로 시뮬레이션 하기 (20) | 2010.08.11 |
| [시스템 시뮬레이션 연재] 2. 구동원으로 DC 모터 고려하기 (64) | 2010.08.11 |